猕猴中的脊柱模块可以独立地控制前肢力方向和幅度

日本的研究人员首次展示了脊柱电机模块假设在灵长类动物臂中,在疾病或伤害后开放新的恢复途径。
人的手有27块肌肉和18个关节,我们的神经系统能够协调复杂的运动。然而,组合的数量——或自由度——是如此之大,以至于人为地复制这种控制和调整肌肉即使是现代超级计算机的实时税收的活动也是如此。虽然中央使用的方法神经系统为了减少这种复杂性仍在研究过,电机模块假设是一种可能性。
在运动模块假说下,大脑招募了神经元间模块脊髓而不是单独的肌肉来创造运动,其中不同的模块可以组合来创造特定的运动。近40年前,对青蛙的研究表明,同时招募控制腿部肌肉的两个神经元模块,可以创造出代表这两个组成模式的“线性叠加”的相同运动活动模式。
一个由国家神经病学中心和精神病学神经生理学系的Kazuhiko Seki领导的国际研究团队,与德雷克塞尔大学的David Kowalski和京都大学博比高级研究中心的Tomohiko Takei合作,试图确定这种运动控制方法是否也存在于灵长类动物的脊髓中。如果得到验证,它将为脊柱中间神经元在运动活动中的重要性提供新的见解,并为运动障碍的治疗带来新的思路,甚至可能是一种让脊柱损伤后的肢体“复活”的方法。
该研究小组在三只猕猴的颈脊髓中植入了一小组电极。在麻醉下,使用一种称为椎管内微刺激(ISMS)的技术,分别招募不同组的中间神经元。研究小组发现,就像在蛙腿实验中一样,在双点模拟过程中,手臂在手腕处的受力方向等于单个招募的输出的线性总和。然而,与蛙腿不同的是,输出的力大小可能比单个输出的简单线性总和高出许多倍。当研究小组检查肌肉活动时,他们发现这种超线性的总和存在于大多数肌肉中,尤其是肘部、手腕和手指。
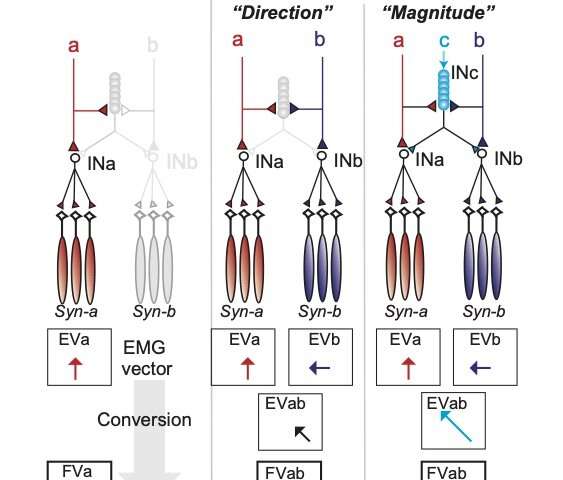
“这是一个非常有趣的发现有两个原因,”Seki解释道。“首先,它展示了与手指运动量增加的灵长类脊髓的特定特点。第二,我们现在拥有直接证据的灵长类动物可以在脊髓中使用电机模块来控制臂移动方向和有效且独立的力量。“
实际上,在灵长类动物的脊髓中进行配对刺激,不仅可以直接激活两组中间神经元INa和INb,这两组神经元利用目标肌肉的协同效应syna和synb,来设定手臂的运动轨迹,但也可以激活第三组间神经元,这些神经元可以适应脊柱水平的运动活动,从而改变运动的力度。这将让大脑规划手臂应该走的路径,同时脊髓适应肌肉活动以确保路径的发生。
这种“计划和调整”方法的一个例子是电机控制的方法是从一罐苏打水中饮用的巧妙简单的行为。大脑可以预先确定将罐头抬到嘴巴的最佳方式,但可以罐头的实际苏打水量 - 因此可以的罐子的重量 - 也许是未知的。一旦你的大脑确定了轨迹,就可以在这种情况下ina和inb-完成该动作所需的力量可以在公司中单独调制,而不是重新确定需要哪些肌肉。
本研究通过在脊髓中存在的电动机模块可以有效地控制灵长类的臂运动首次证明。基于本研究的结果,预计基于该研究的分析和解释人肢运动的分析和解释发动机模块假设在未来还会进一步发展。
在机器人技术领域中,该控制理论可能导致更有效的方法来创造复杂的肢体运动,而在临床医学领域,预计将通过分析由神经变性疾病引起的运动障碍和患有的运动障碍来创建新的诊断和治疗方法笔画。
进一步探索














用户评论